首先先来讲讲闲话
如果让你现在去搞机器学习,你会去吗?不会的话是因为你对这方面不感兴趣,还是因为你觉得这东西太难了,自己肯定学不来?如果你觉的太难了,很好,相信看完这篇文章,你就会有胆量踏入机器学习这一领域。
机器学习(Machine-Learning),一个在才学一年编程的人看来十分高大尚的东西,不知不觉就接触了它。暑假的时候表哥给我布置了任务,在github上有一篇DeepLearningFlappyBird,他当时要我一天之内先让这段代码跑起来,然后第二天再把这段代码翻译成C++的.......wtf???我当时一脸懵逼,一个才学编程一年不到的,C和C++的水平也就差不多是大学课堂教完后的那种,跑起来可能还算容易,但要翻译?!! 饶了我吧 orz。。。当时配了一天的环境,到那天晚上快12点了,终于跑起来了。然后到了第二天,我先去查了查tensorflow,opencv3在VS上使用,发现根本搞不定。。。我电脑上装的是VS2013,里面只有32位的,emmmm。。得下个VS2017,看了看电脑空间,不够了!好的,放弃,以后有空闲得慌了再来搞吧。。。。
前几天开学了,还没什么事干,突然就想到机器学习了(其实dalao提到了感知机这东西),就试着去做了做,也就当个入门吧。
再来聊聊机器学习
机器学习说白了跟人类学习是一样的,只不过机器可以无止境的学习,并且,机器学习时完全不需要懂什么原理,只要知道怎么去实现就行。就如Alpha Go,你们觉得它懂得棋理吗?我觉得肯定不懂,但通过对无数的棋谱的学习,让人觉得它肯定掌握了围棋的真谛。
机器学习的标准范式表达
对于一个Task及其Performance的度量方法,给出特定的Algorithm,能够通过利用Experience Data不断提高在该Task上的 Performance的方法,就称为机器学习。
其实这个定义就是“学习”的全部含义,这个事情按照机器的思路来做,就是机器学习
说白了,只要算法合理,每次学习都能有提高,机器有足够的运算能力,就能将机器的能力达到极致从而超越人类。机器学习的本质就是建立("数据"——"认知")关系库。
下面就来讲讲感知机
先扯扯定义:感知机(perceptron)是二分类的线性分类模型,输入为实例的特征向量,输出为实例的类别(取+1和-1)。感知机对应于输入空间中将实例划分为两类的分离超平面。感知机旨在求出该超平面,为求得超平面导入了基于误分类的损失函数,利用梯度下降法 对损失函数进行最优化(最优化)。感知机的学习算法具有简单而易于实现的优点,分为原始形式和对偶形式。感知机预测是用学习得到的感知机模型对新的实例进行预测的,因此属于判别模型。感知机由Rosenblatt于1957年提出的,是神经网络和支持向量机的基础。
拿二维平面举例,
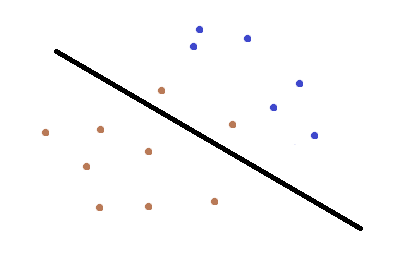 看这张图,很明显,直线没有将红蓝点完全分开在两个区域,我们可以将其称为错误的直线,感知机要做的,就是根据各点坐标,将错误的直线纠正为正确的,这样得到的直线就是训练的结果。
看这张图,很明显,直线没有将红蓝点完全分开在两个区域,我们可以将其称为错误的直线,感知机要做的,就是根据各点坐标,将错误的直线纠正为正确的,这样得到的直线就是训练的结果。
说了这么多,要怎么实现呢? 看下面的流程图
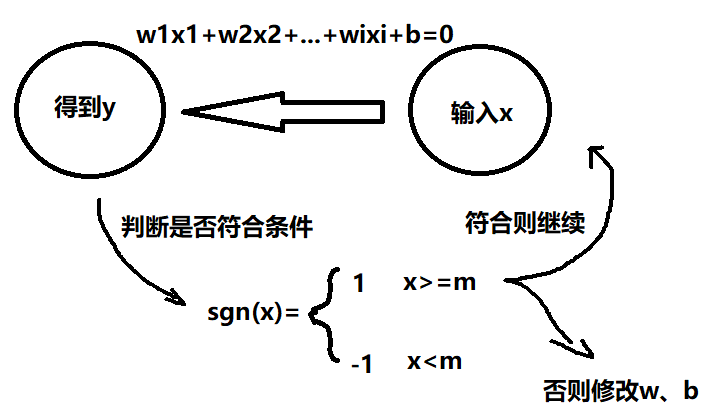
/* * 判断所有点的位置关系,进行分类 */ public boolean classify() { boolean flag = false; while (!flag) { for (int i = 0; i < arrayList.size(); i++) { if (Anwser(arrayList.get(i)) <= 0) { Update(arrayList.get(i)); break; } if (i + 1 == arrayList.size()) { flag = true; } } } return true; }
/* * 点乘返回sum */ private double Dot(double[] w, double[] x) { double sum = 0; for (int i = 0; i < x.length; i++) { sum += w[i] * x[i]; } return sum; } /* * 返回函数计算的值 */ private double Anwser(Point point) { System.out.println(Arrays.toString(w)); System.out.println(b); return point.y * (Dot(w, point.x) + b); }
如果还有疑问,那可能就是w与b怎么修改了,我们会定义一个变量η(0≤η≤1)作为步长,在统计学是中成为学习速率。步长越大,梯度下降的速度越快,更能接近极小点。如果步长过大,有可能导致跨过极小点,导致函数发散;如果步长过小,有可能会耗很长时间才能达到极小点。默认为1
对于wi wi+=η*y*xi
对于b b+=η*y
public void Update(Point point) { for (int i = 0; i < w.length; i++) { w[i] += eta * point.y * point.x[i]; } b += eta * point.y; return; }
这样,我们就可以完成成w、b的更新了。
将上面的步骤组合起来,就可以实现感知机了。
谈谈自己的想法
写了这个感知机后,发现机器学习并不是想象当中那么难,其实只要知道怎么去算就可以了(目前比较浅显的理解,可能我还没接触到难的地方),而且Python中,有关机器学习的库可以说是很完善了,如果熟悉了这些库的用法,即使不懂算法,也时能用这些库来做开发的,要知道算法岗和开发岗还是不一样的
这是我选取的测试用例及结果
1 Point p1 = new Point(new double[] { 0, 0, 0, 1 }, -1);2 Point p2 = new Point(new double[] { 1, 0, 0, 0 }, 1);3 Point p3 = new Point(new double[] { 2, 1, 0, 0 }, 1);4 Point p4 = new Point(new double[] { 2, 1, 0, 1 }, -1);
[0.0, 0.0, 0.0, 0.0]0.0[0.0, 0.0, 0.0, -1.0]-1.0[0.0, 0.0, 0.0, -1.0]-1.0[1.0, 0.0, 0.0, -1.0]0.0[1.0, 0.0, 0.0, -1.0]0.0[1.0, 0.0, 0.0, -1.0]0.0[1.0, 0.0, 0.0, -1.0]0.0[-1.0, -1.0, 0.0, -2.0]-1.0[-1.0, -1.0, 0.0, -2.0]-1.0[0.0, -1.0, 0.0, -2.0]0.0[0.0, -1.0, 0.0, -2.0]0.0[1.0, -1.0, 0.0, -2.0]1.0[1.0, -1.0, 0.0, -2.0]1.0[1.0, -1.0, 0.0, -2.0]1.0[1.0, -1.0, 0.0, -2.0]1.0[-1.0, -2.0, 0.0, -3.0]0.0[-1.0, -2.0, 0.0, -3.0]0.0[0.0, -2.0, 0.0, -3.0]1.0[0.0, -2.0, 0.0, -3.0]1.0[0.0, -2.0, 0.0, -3.0]1.0[2.0, -1.0, 0.0, -3.0]2.0[2.0, -1.0, 0.0, -3.0]2.0[2.0, -1.0, 0.0, -3.0]2.0[2.0, -1.0, 0.0, -3.0]2.0[0.0, -2.0, 0.0, -4.0]1.0[0.0, -2.0, 0.0, -4.0]1.0[0.0, -2.0, 0.0, -4.0]1.0[2.0, -1.0, 0.0, -4.0]2.0[2.0, -1.0, 0.0, -4.0]2.0[2.0, -1.0, 0.0, -4.0]2.0[2.0, -1.0, 0.0, -4.0]2.0[0.0, -2.0, 0.0, -5.0]1.0[0.0, -2.0, 0.0, -5.0]1.0[0.0, -2.0, 0.0, -5.0]1.0[2.0, -1.0, 0.0, -5.0]2.0[2.0, -1.0, 0.0, -5.0]2.0[2.0, -1.0, 0.0, -5.0]2.0[2.0, -1.0, 0.0, -5.0]2.0[0.0, -2.0, 0.0, -6.0]1.0[0.0, -2.0, 0.0, -6.0]1.0[0.0, -2.0, 0.0, -6.0]1.0[2.0, -1.0, 0.0, -6.0]2.0[2.0, -1.0, 0.0, -6.0]2.0[2.0, -1.0, 0.0, -6.0]2.0[2.0, -1.0, 0.0, -6.0]2.0